Is het technisch mogelijk om het controleren van gasleidingen over te laten aan een robot? ‘Ja’, zeggen onderzoekers van Saxion en netbeheerder Alliander. Hun bewijs voor deze claim, een robothond met de toepasselijke naam ‘LASS-E’, doorstond al een aantal belangrijke proeven. Wat maakt deze robothond zo innovatief? Wanneer kunnen we hem bij ons in de straat tegenkomen? En wat heeft het onderzoeksproject nog meer opgeleverd? Saxion-onderzoeker Victor Sluiter is ‘technical lead’ van het project en vertelt ons meer.
Maar eerst even naar de aanleiding van het onderzoeksproject: de praktijk. In dit geval, de praktijk van gasleidinginspecties. Als netbeheerder is Alliander verplicht om hun 42.000 kilometer aan leidingen en 2,5 miljoen aansluitleidingen te controleren op lekkages. Met een tekort aan technisch personeel, is het nalopen van dit enorme netwerk nu al een flinke opgave, vertelt Eva Dienske, R&D Specialist bij Alliander. Volgens haar wordt die opgave in de toekomst alleen maar groter: “Door nieuwe wetgeving vanuit de EU, zullen we onze gasnetten in de toekomst veel vaker moeten nalopen. Daar kunnen we alle hulp bij gebruiken. We zien technologische innovatie als een hulpmiddel voor onze monteurs om dit sneller en efficiënter voor elkaar te krijgen.”
Alliander klopte voor hulp aan bij Saxion. Hun vraag: is het technologisch mogelijk om een robot te bouwen die onze gasleidingen kan afzoeken en gaslekken kan opsporen? Het antwoord laat zich niet langer raden: het loopt op vier poten en heet LASS-E. Victor Sluiter, onderzoeker bij het lectoraat Smart Mechatronics and Robotics, vertelt meer over het project waarbinnen deze ‘gaslek-zoek-hond’ is ontwikkeld.
Technologie
Wat maakt LASS-E volgens hem zo innovatief? “Zo’n robot kun je met een afstandsbediening allerlei kanten op sturen. Maar in plaats van zelf de afstandsbediening besturen, kun je er ook een computer aanhangen die diezelfde commando’s geeft; naar voren, naar links, naar rechts. Daarnaast kan de computer met hulp van GPS-satellieten zien waar hij is. Onze gedachte was: als we die computer nou een kaart geven met daarop de pijpleidingen, en hij weet met behulp van de satellieten waar hij zich bevindt, dan kan hij de robot de commando’s geven om over die pijpleidingen te lopen”, aldus Victor.
Gassensor
Zo kan de robothond autonoom de pijpleidingen in de grond volgen, maar LASS-E spoort ook gaslekken op. “Hiervoor hebben een extra onderdeel toegevoegd: de gassensor”, vertelt de onderzoeker. “Die meet hoeveel gas eruit de grond lekt. En omdat we weten waar we zijn, vanwege de GPS-satellieten en de kaarten, kunnen we vaststellen waar een gaslek zit.”
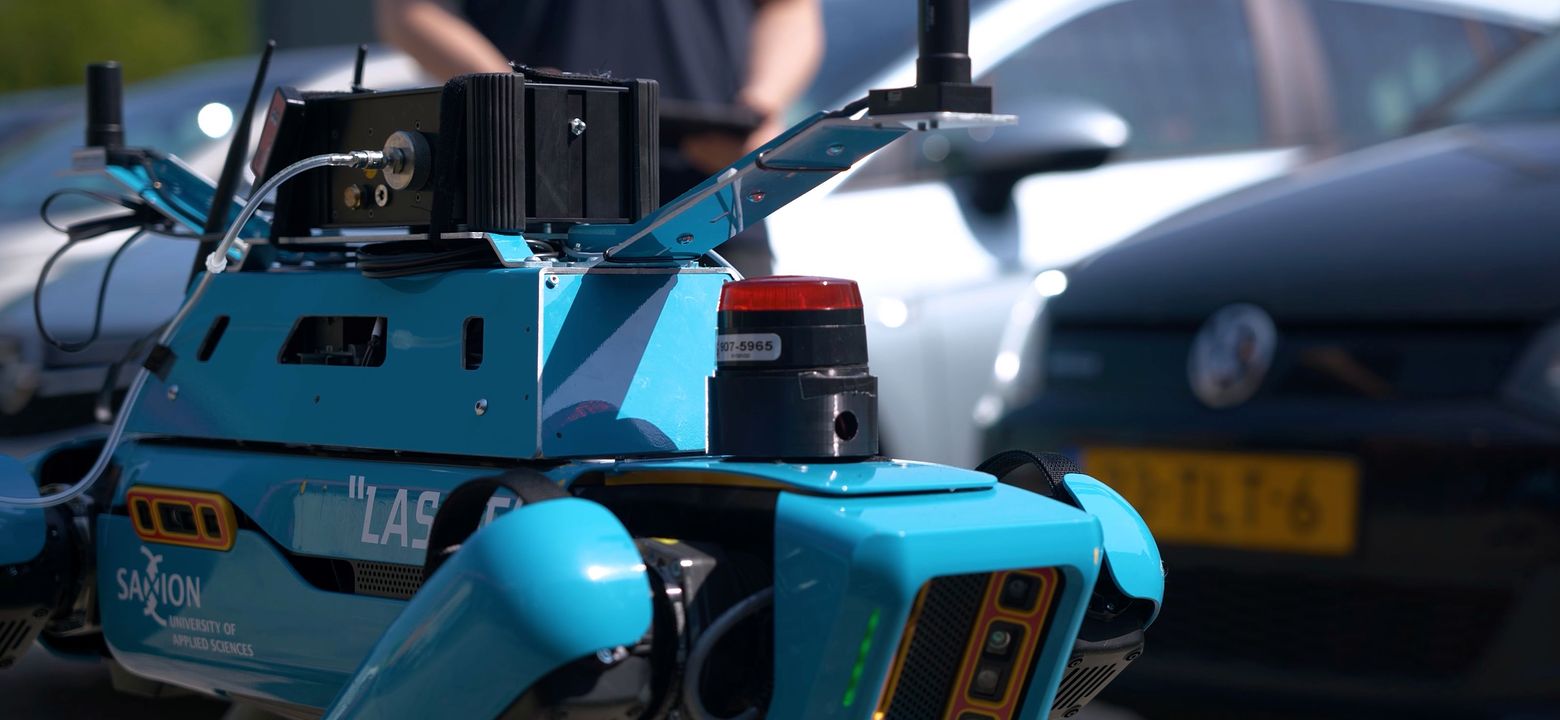
Zwaailicht
Als LASS-E een gaslek detecteert, gaat het zwaailicht aan. “Dat lijkt misschien maar een lullig dingetje, maar eigenlijk is dit het meest geweldige dat we erin hebben gebouwd. Het bewijst namelijk dat we die meetwaarden van de gassensor kunnen inladen in het systeem dat ook de navigatie aanstuurt. Nu gaat het zwaailicht aan, maar het commando kan ook zijn ‘maak een foto van de omgeving’, ‘markeer deze locatie’ of ‘stuur hem op naar een database’. Maar je kunt de robot ook verder laten speuren naar een groter gaslek in de buurt.”
Vraagstukken
Daarmee hebben de onderzoekers aangetoond dat het technisch mogelijk is om een robot zelfstandig gaslekken op te laten sporen. Maar het capaciteitsprobleem van Alliander is daarmee nog lang niet opgelost, vertelt de Saxion-onderzoeker. “Naast de juridische vraagstukken, zijn er ook een heleboel ethische bezwaren waar eerst goed naar gekeken moet worden. Kortom, wat kan en mag je doen met een robot op straat?”
Platform
Daarnaast ziet hij op het technische vlak nog ruimte om de robot te verbeteren. “We hebben voortgebouwd op een bestaande robothond. En dat is superfijn; dat ding kan stoepjes op, trappen af en door het gras. Maar 90 procent van de leidingen in en rondom de stedelijke omgeving ligt gewoon onder het trottoir. Misschien is een rijdend platform dan wel beter? Bijvoorbeeld als je kijkt naar batterijduur. Dat zijn vragen die we nog gaan onderzoeken.”
Robotvloot
“En voor Alliander”, vertelt Victor verder, “brengt het inzetten van robots ook nog allerlei organisatorische vraagstukken met zich mee. Je hebt dan ineens een ‘robotvloot’ te onderhouden. En je moet de inspecteurs leren hoe ze de robots kunnen gebruiken in hun werk. Dat is het leuke aan dit onderzoek: het is niet alleen nieuw voor ons, maar ook voor een bedrijf als Alliander.”
Normeringen
En dan zijn er ook nog de normeringen. Victor: “Als je het hebt over toegepast onderzoek, dan begint en eindigt dat bij normeringen. Je kunt wel zeggen: dit werkt. Maar als de hele industrie op een andere manier werkt, dan is er vaak een norm die dat voorschrijft. Zo zijn er ook normen in Nederland voor hoe je een gasleiding moet inspecteren en die wordt slechts één keer in de tien jaar aangepast.”
...een gaslek-zoek-auto die ongeveer de locatie bepaalt en een inspecteur met een gaslek-zoek-robot die dan de nauwkeurige inspectie doet volgens alle regels. Dat zie ik wel voor me.”

Combinatie
Voorlopig wandelt LASS-E dus nog niet bij ons de straat in, en al helemaal niet zonder een ‘baasje’ dat precies weet wat de robot kan en mag. Als Victor dan toch koffiedik moet kijken, verwacht hij dat de uiteindelijke praktijkoplossing een combinatie wordt van verschillende innovaties: “Er zijn bijvoorbeeld ontwikkelingen met ‘gaslek-zoek-auto’s’. We onderzoeken of we beide innovaties naast elkaar kunnen gebruiken: een gaslek-zoek-auto die ongeveer de locatie bepaalt en een inspecteur met een gaslek-zoek-robot die dan de nauwkeurige inspectie doet volgens alle regels. Dat zie ik wel voor me.”
Kennis hergebruiken
De technologie die ontwikkeld is om LASS-E zelfstandig te laten navigeren, kan volgens Victor ook in andere toepassingsgebieden worden gebruikt, zoals in de landbouw. De kennis uit dit project wordt dan ook hergebruikt in een project over autonome landbouw. “In dit project was nauwkeurige navigatie belangrijk. Echt tot achter de komma nauwkeurig. Die kennis gebruiken we weer in het project over autonome landbouw.” Maar andersom ook: “In het project over autonome landbouw leerden we weer hoe je kunt schakelen tussen verschillende navigatiealgoritmes.”
Open source
Voor het schakelen tussen verschillende navigatievormen is gebruik gemaakt van navigatiesoftware die vrij toegankelijk is voor ontwikkelaars, ook wel ‘open source’ genoemd. Dit fenomeen speelde een belangrijke rol in het project, vertelt Victor tot slot: “We hebben geprobeerd om ook weer kennis terug te geven aan de ‘ontwikkelcommunity’, zoals een deel van de raamwerken die gebruikt zijn voor de navigatie.” Een ander voorbeeld is de hightech rugzak die LASS-E draagt: “Eerst hadden we hier een inkoopdeel voor, maar dat beviel zo slecht dat we zelf een rugzak hebben ontwikkeld. Ook die gaan we open source maken.”
Bekijk ook de video over LASS-E
Over het project
LASS-E is ontwikkeld binnen het CHARISMA-project. CHARISMA (CH4 Autonomous Robotized Inspection for Sustainable Maintenance) is een project van de partners Alliander en hogeschool Saxion en wordt gefinancierd door TechForFuture. Het doel van het project is het ontwikkelen van een efficiënte, veilige en betrouwbare oplossing die voldoet aan de inspectienormen voor gasleidingen vanuit de Europese Unie en helpt het milieu te beschermen.

